AC motors are divided into two types, synchronous motors and asynchronous motors also called induction motors. The biggest difference between synchronous and asynchronous motors (induction motors) is whether the speed of the rotor is consistent with the speed of the rotating magnetic field in the stator. If the rotor speed of rotation and the stator field speed are the same, this is called a synchronous motor; otherwise, it is an asynchronous motor. In addition, there are major differences specific to the performance and application parameters between the two.
Difference in construction
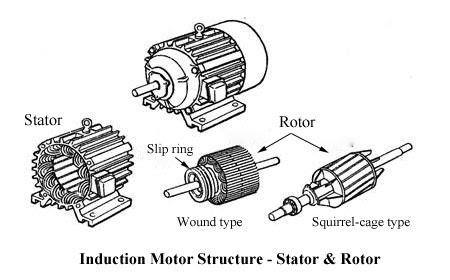
The stator windings of the synchronous and induction motors are similar, and the main difference is in the rotor structure. There are DC field windings in the rotor of the synchronous motor, which must be supplied with the external excitation power introduced through the slip ring. However, the rotor windings of the induction motor are short-circuited, which produce current by electromagnetic induction. On the other hand, synchronous motors are more complex and expensive.
Stator
The components of the synchronous motor stator are basically the same as those of induction motors, playing a role in receiving, producing electrical energy and producing rotating magnetic fields. There is not much difference in the form of the result. The stators of the synchronous motor and the induction motor are made of the magnetic stator core, conductive three-phase AC windings, the base of the fixing core, the terminal cover etc.
Rotor
- Synchronous motor: the core of the rotor pole is laminated by steel sheets perforated by steel sheets. The pole core is placed by excitation windings that are wound with insulated copper wires. Structure of the PM synchronous motor For permanent magnet synchronous motors, the permanent magnet on the rotor is the key factor to distinguish it from other motors.
- Induction motor: the rotor consists of iron core and windings, is made of laminated steel sheets and is installed on the rotary shaft. There are two types of rotor: squirrel cage and wound type. The wound type induction motor is also equipped with a slip ring and a brush mechanism.
Difference at work
1. Synchronous motor
The synchronous motor rotates for the interaction between the rotating magnetic field produced by the drive stator windings and the magnetic field generated by the rotor. For the PM synchronous motor, it rotates due to the driving torque generated by the interaction between the rotating magnetic field of the stator and the secondary magnetic field of the rotor. As for the rotor winding, it does not induce current during the normal rotation of the motor and also does not participate in the work. It only serves to start the engine.
During the steady state operation of the synchronous motor, there is a constant relationship between the rotor rotation speed and the grid frequency:
N = Ns = 120f / p
f - the network frequency, p - the number of the motor pole, Ns - synchronous speed.
2. Induction motor
The stator core of the three-phase induction motor is incorporated with symmetrical three-phase windings. After the connection, between the stator and the rotor produces a rotating magnetic field that rotates at a synchronous speed. The rotor bar is cut by the rotating magnetic field in which it produces the induced current. The rotor drive bar is subject to electromagnetic force in the rotating magnetic field, therefore, the rotor overcomes the rotation of the load torque and accelerates its rotation. When the electromagnetic torque is equal to the load torque, the motor rotates at a constant speed.
The rotation speed of the induction motor (stator speed) is slower than the speed of the magnetic field of rotation and this difference is called "slip", expressed by the percentage of synchronous speed:
S = (Ns-N) / Ns.
S - slip, Ns - the speed of the magnetic field, N - the speed of the rotor.
Difference in applications
- Synchronous motors are used mainly in large generators, while induction motors are almost used as motors to drive machines.
- For synchronous motors, their power factor can be flexibly adjusted by excitation. However, the power factor of the induction motor is not adjustable; therefore, in some large factories, for the most applied induction motors, a synchronous motor can be added as a phase modifier, to adjust the power factors of the factory and network interface. However, due to the high cost of synchronous motors and a lot of maintenance, capacitors are now commonly used to compensate for the power factor.
- The operation of the synchronous motor is not as easy as the induction motor because the synchronous motor has the excitation winding and the slip ring in need of a high-level control of the excitation. In addition, compared to the maintenance-free induction motor, the work to keep the motor synchronous is great. So, like an engine, the engine